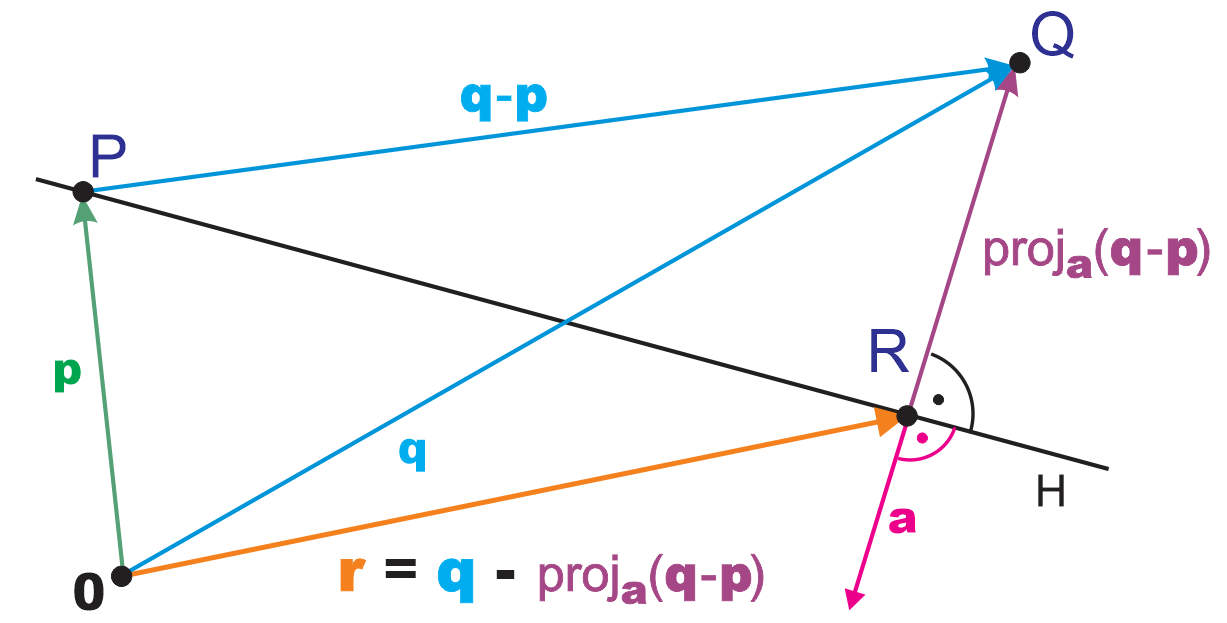
The nice thing about this proof is, while we illustrate the underlying idea in \(\RNrSpc{2}\), the argument itself, together with all computations, is valid in all positive dimensions. Choose an arbitrary point \(P\) on \(H\). This means that the position vector \(\Vect{p}\) of \(P\) satisfies \(\DotPr{\Vect{a}}{\Vect{p}} = c\).
For an arbitrary point \(R\) on \(H\) form the arrow \(\Arrow{R}{Q}\). Inspection suggests that \(R\) is closest to \(Q\) exactly when the vector represented by \(\Arrow{R}{Q}\) is perpendicular to \(H\) or, equivalently, if it is parallel to \(\Vect{a}\). This means that \(\Arrow{R}{Q}\) represents the vector
As a consequence, \(\Vect{r}\DefEq \Vect{q}- \OrthoPrjctnOf{\Vect{a}}{\Vect{q}-\Vect{p}}\) is our candidate for the point on \(H\) closest to \(Q\). We need to verify that \(R\) is indeed closest.
So, let \(S\) be an arbitrary point on \(H\), and let \(\Vect{s}\) be its position vector. Then we know that
Consequently, \(\DotPr{\Vect{a}}{(\Vect{r} - \Vect{s})} = 0\); which means that \((\Vect{r} - \Vect{s})\) is perpendicular to \(\Vect{a}\) and, hence, to \((\Vect{q} - \Vect{r})\). With this we show that \(S\) is further away from \(Q\) than \(R\), unless \(S=R\):